with Claude
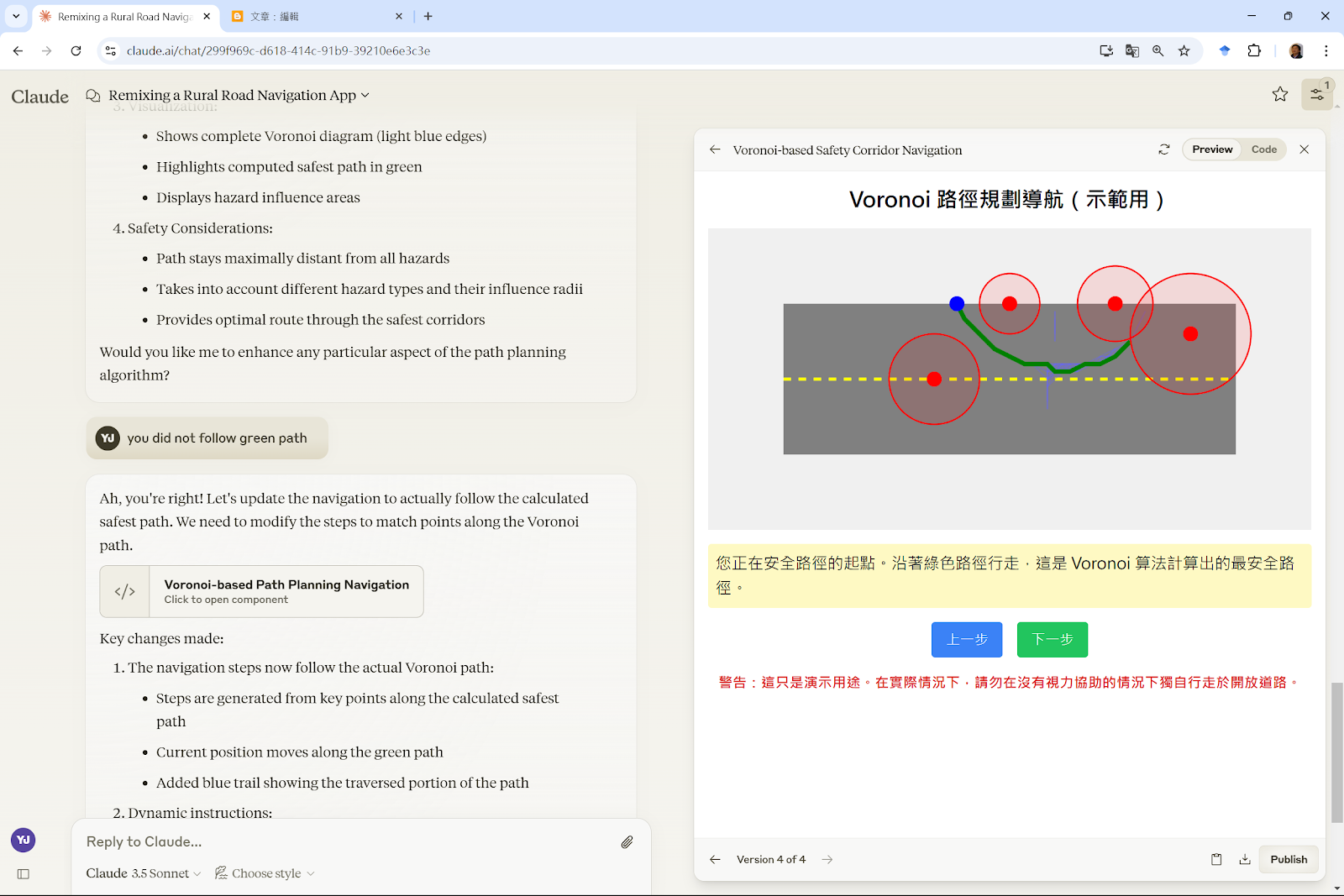
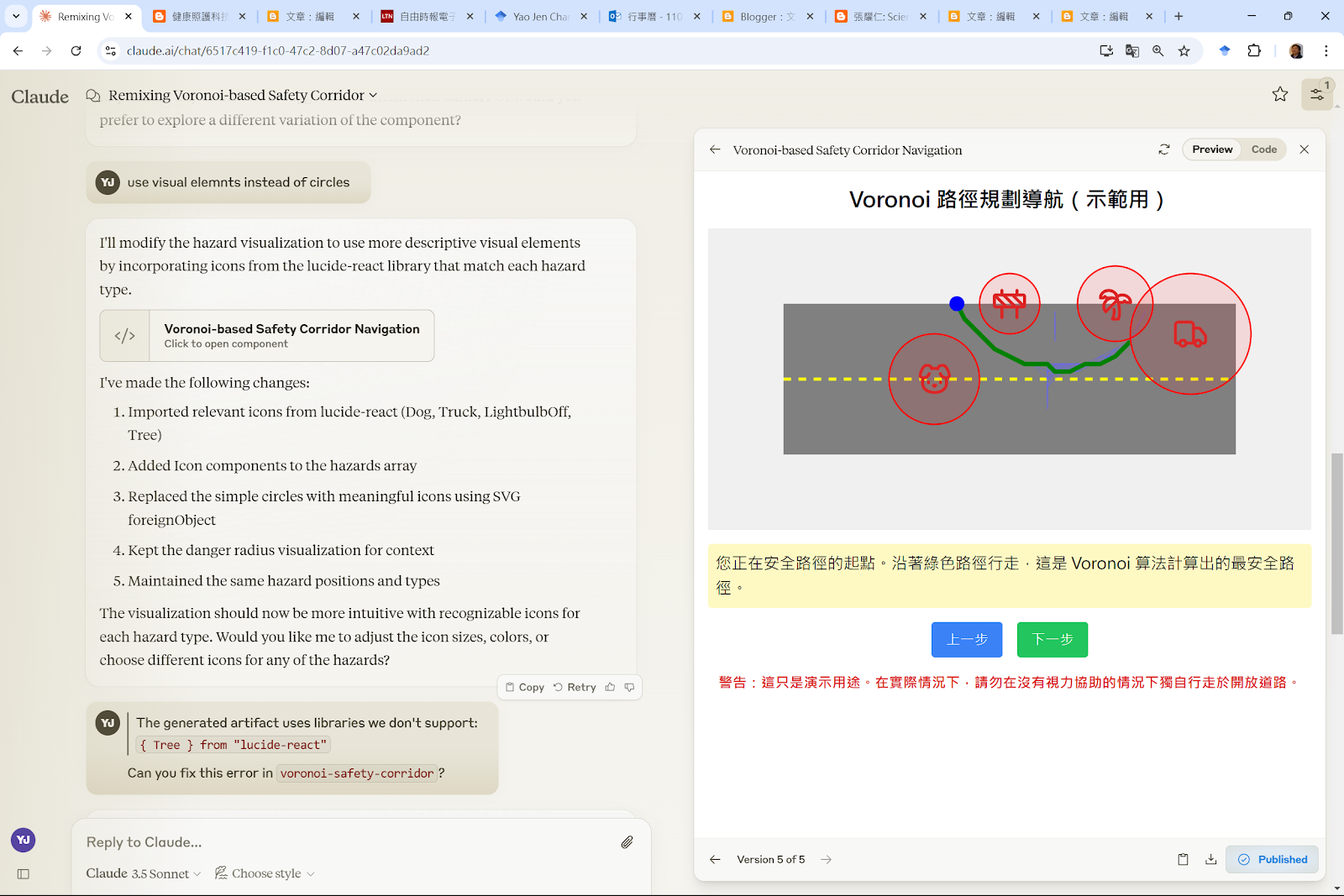
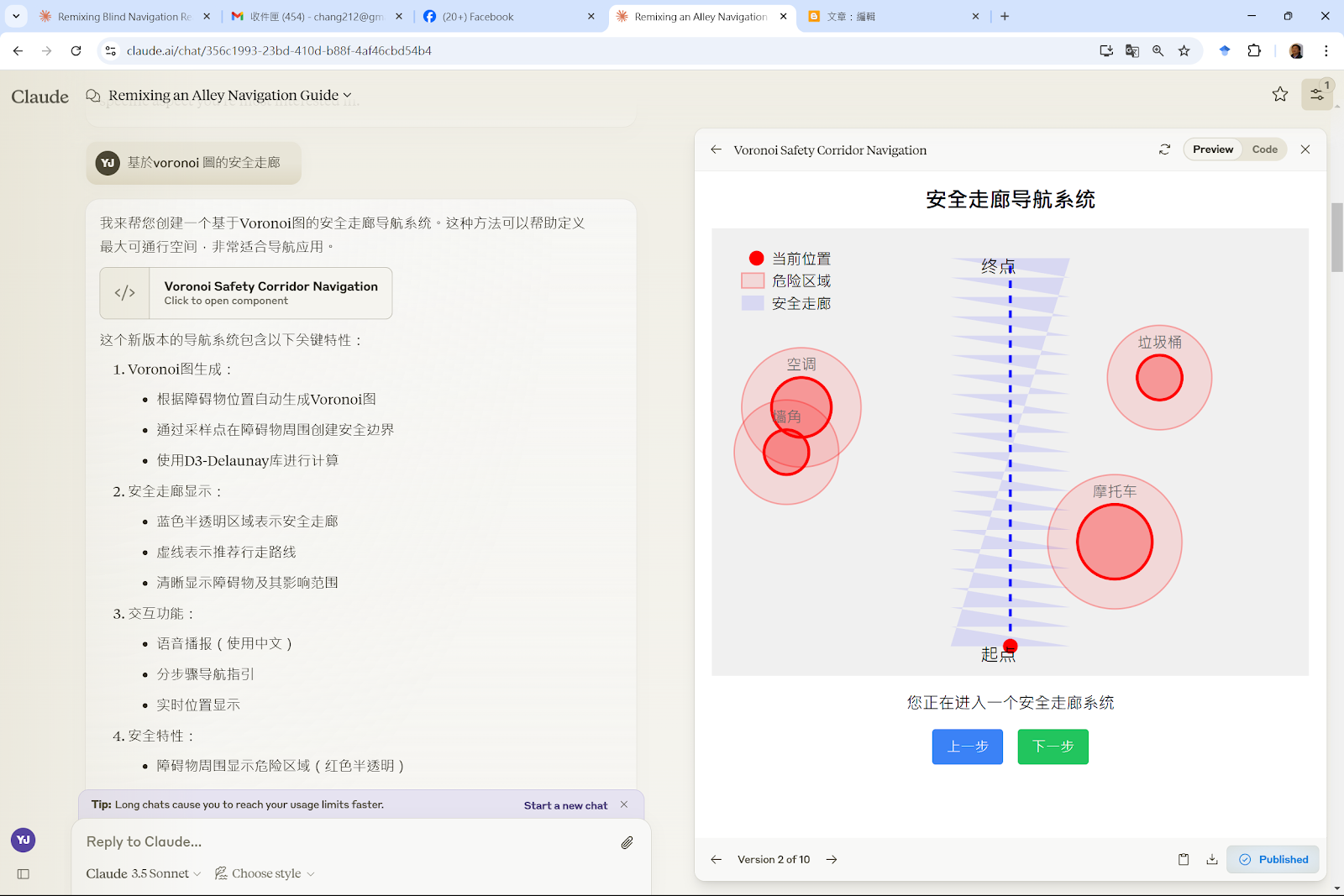
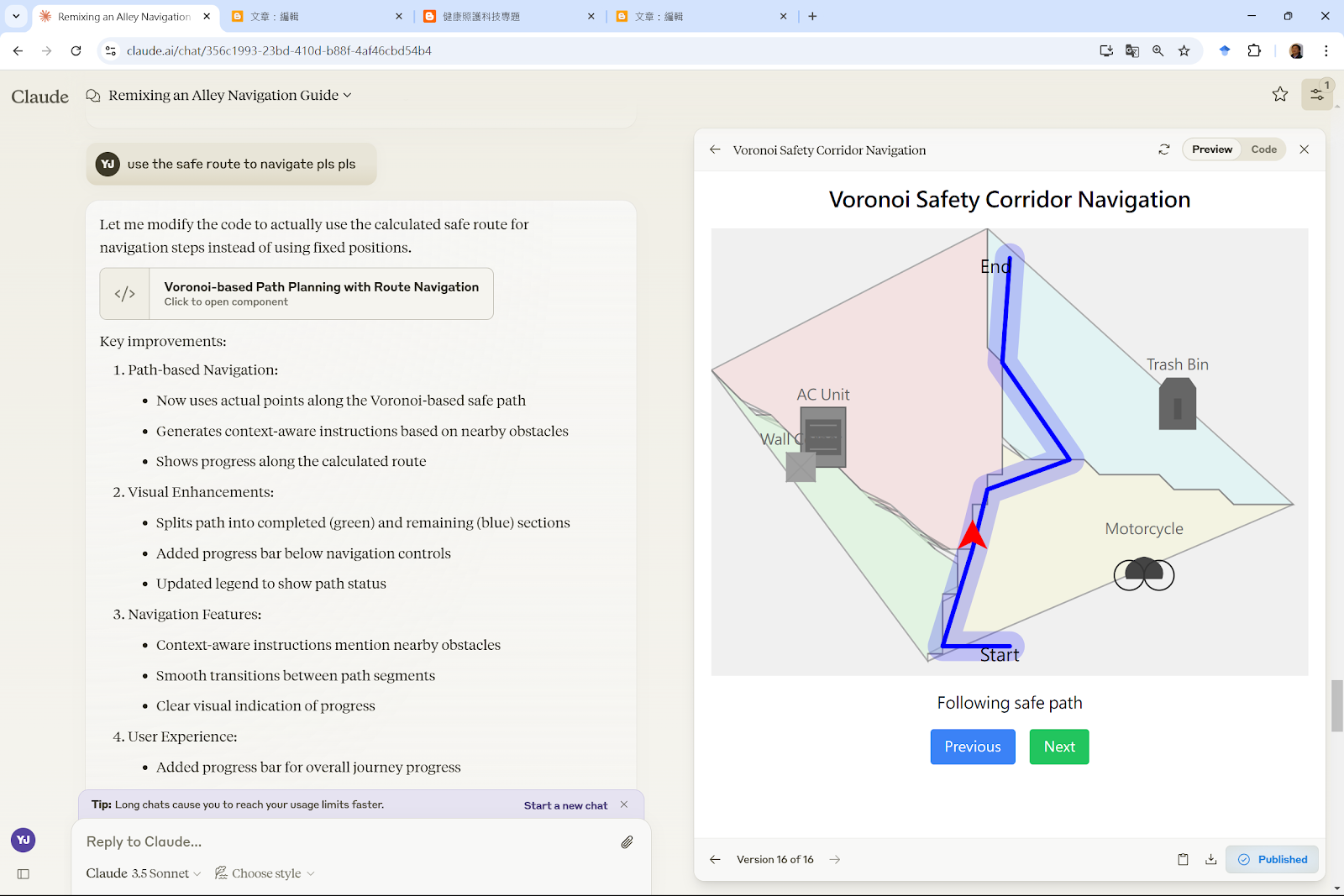
語音導航(同步顯示目前位置)
WorldLabs
AI+VR+Game
智能障礙者生成式AI交通安全VR遊戲訓練系統 (interactive計畫書)
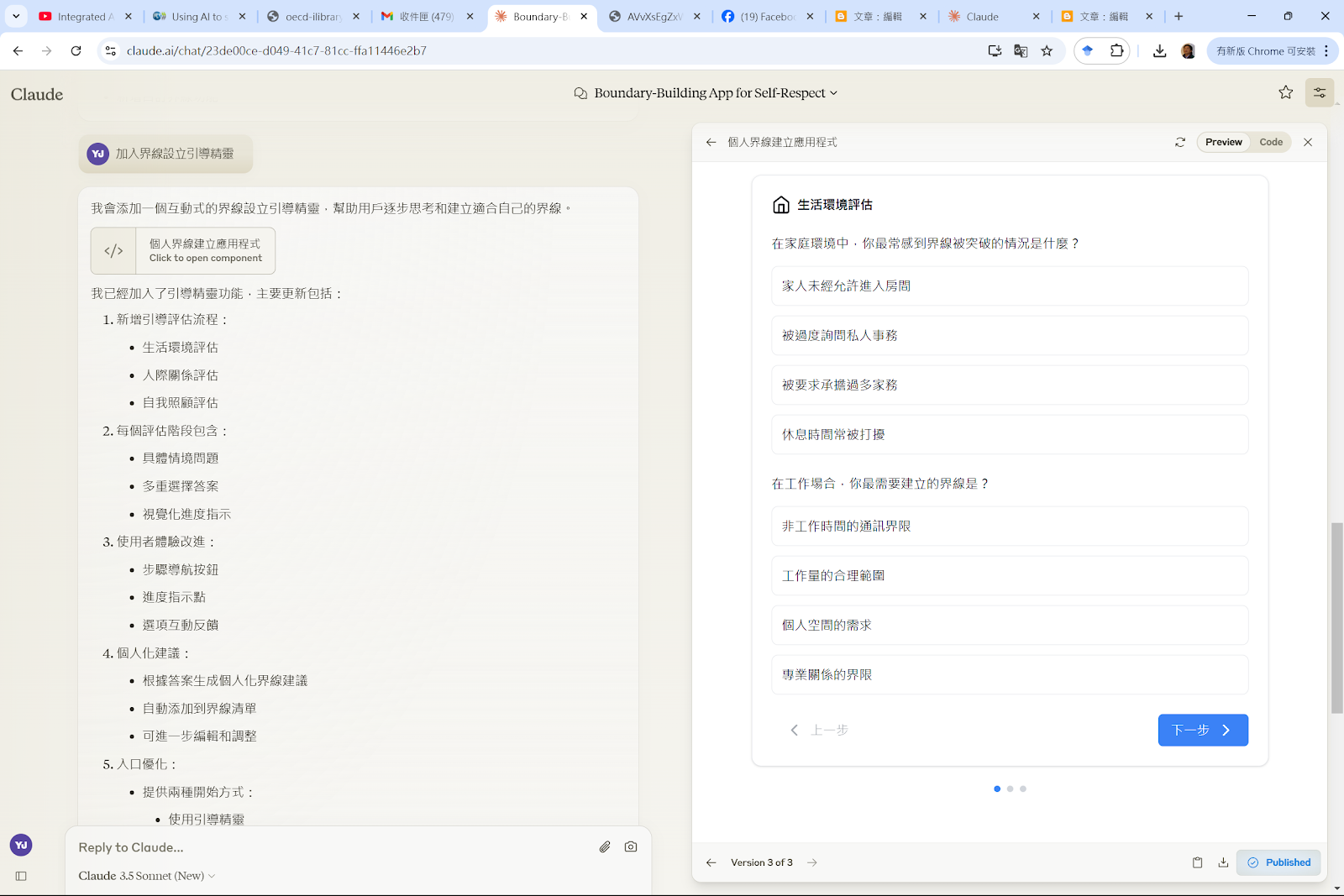
與界限/規則有關的APP
ChatBOT, G4H App, Media Creation
Do we dare article in IEEE spectrum
Woebot health
AI's Role in Emotional Experience Sharing 人工智慧在情感體驗共享中的角色(互動版)
使用 LLM 進行情感分析
LLM與心理健康 框架,界線
AI 輔助人際關係發展與培養情感同理(風險與管理)
G4H App
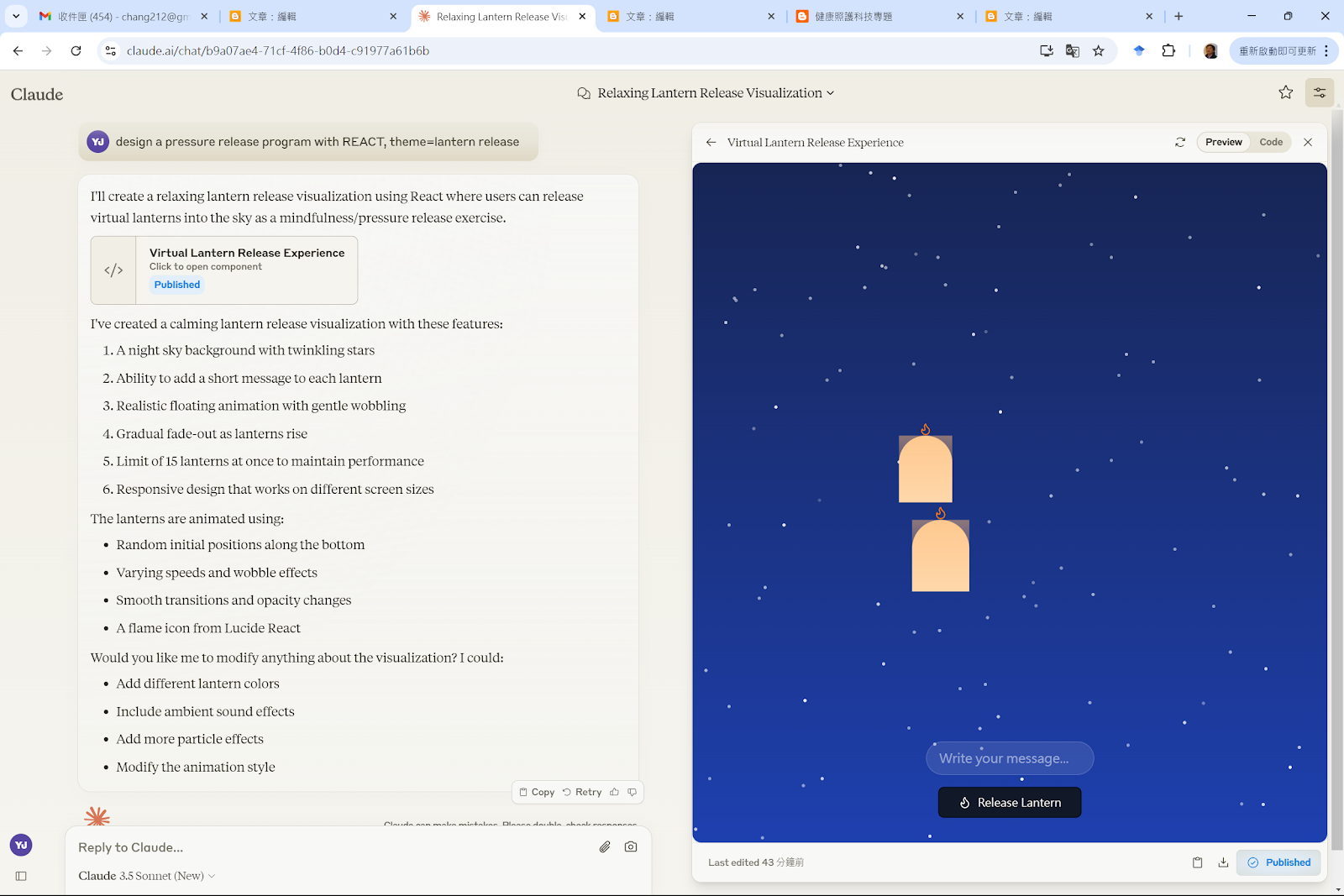
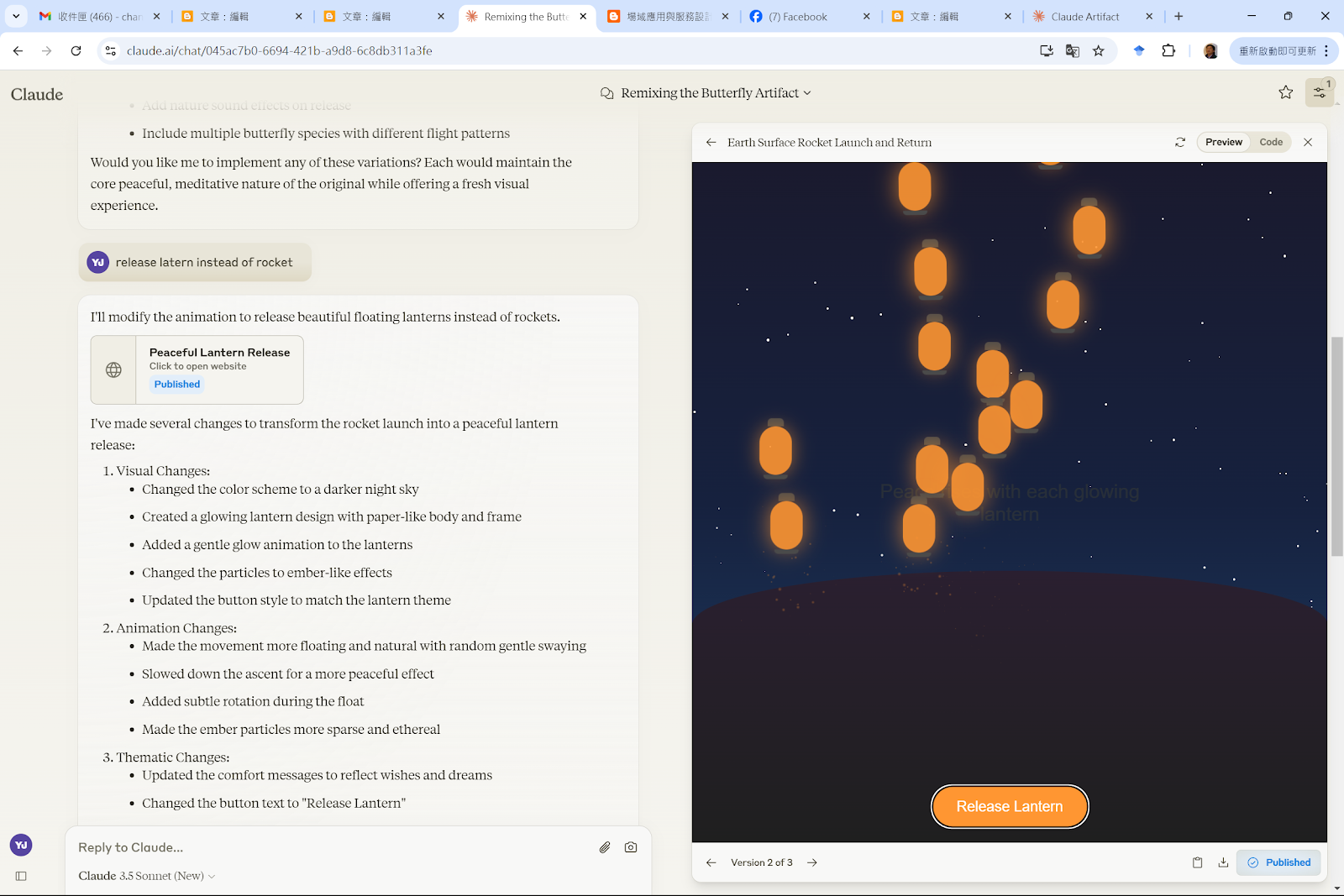
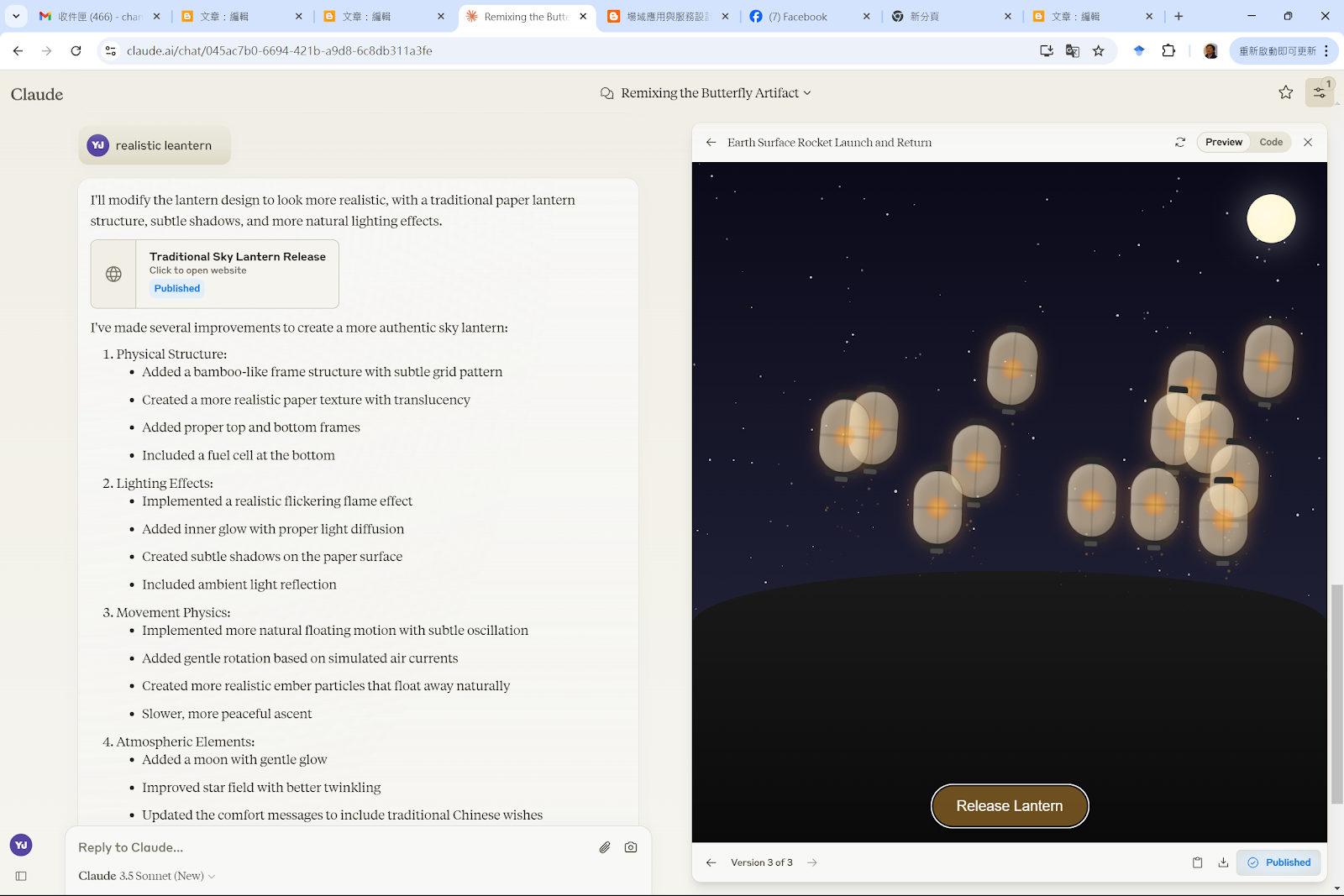
紓壓主題 app 製作
界線主題app製作
Media Creation
情緒釋放發射台 alive






























.webp)
.webp)
.webp)
.webp)
.webp)
.webp)
.webp)
.webp)
.webp)
.webp)